

































.jpg)

.jpg)










.jpg)



.jpg)
.jpg)













.jpg)
























.jpg)





































.png)






.jpg)






* 본 이미지는 참고용입니다.제품의 정확한 사양은 데이터시트를 참고 바랍니다.
- 공유하기
-




기계/모터/동력/유압,공압
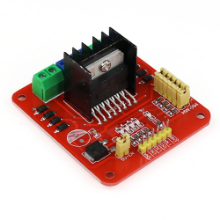
4휠 자동차용 L298N 20W 2채널 모터 드라이버 모듈
4,800원
(VAT 별도)-
제품번호
EN00000319
-
브랜드명
에듀이노
-
제조사
OEM
-
M.O.Q
1
-
평균발송일
약 3일
- 포장단위
-
판매단위
1
-
배송비
3,000 (60,000원 이상 무료배송)
수량
총 주문 금액
4,800원
(VAT 포함) 5,280원
상품상세정보





1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | int Dir1Pin_A = 2; // 제어신호 1핀 int Dir2Pin_A = 3; // 제어신호 2핀 int SpeedPin_A = 10; // PWM제어를 위한 핀 void setup() { pinMode(Dir1Pin_A, OUTPUT); // 제어 1번핀 출력모드 설정 pinMode(Dir2Pin_A, OUTPUT); // 제어 2번핀 출력모드 설정 pinMode(SpeedPin_A, OUTPUT); // PWM제어핀 출력모드 설정 } void loop() { digitalWrite(Dir1Pin_A, HIGH); //모터가 시계 방향으로 회전 digitalWrite(Dir2Pin_A, LOW); analogWrite(SpeedPin_A, 255); //모터 속도를 최대로 설정 delay(2000); digitalWrite(Dir1Pin_A, LOW); //모터가 시계 방향으로 회전 digitalWrite(Dir2Pin_A, LOW); delay(1000); digitalWrite(Dir1Pin_A, LOW); //모터가 반시계 방향으로 회전 digitalWrite(Dir2Pin_A, HIGH); analogWrite(SpeedPin_A, 255); //모터 속도를 최대로 설정 delay(2000); digitalWrite(Dir1Pin_A, LOW); //모터가 반시계 방향으로 회전 digitalWrite(Dir2Pin_A, LOW); delay(1000); } | cs |

등록된 사용후기
사용후기가 없습니다.
등록된 상품문의
상품문의가 없습니다.