



.jpg)













.gif)











.jpg)

















.jpg)















.jpg)


.jpg)






.JPG)










(3).jpg)

.jpg)



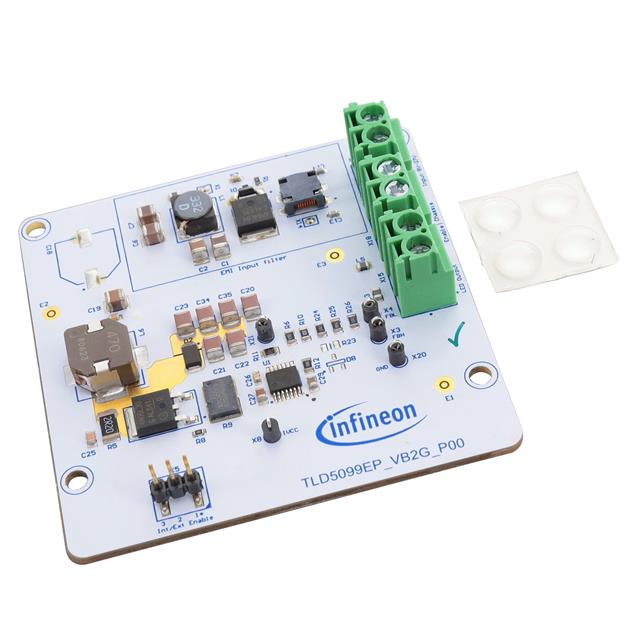
* 본 이미지는 참고용입니다.제품의 정확한 사양은 데이터시트를 참고 바랍니다.
- 공유하기
-




개발보드/프로그래머
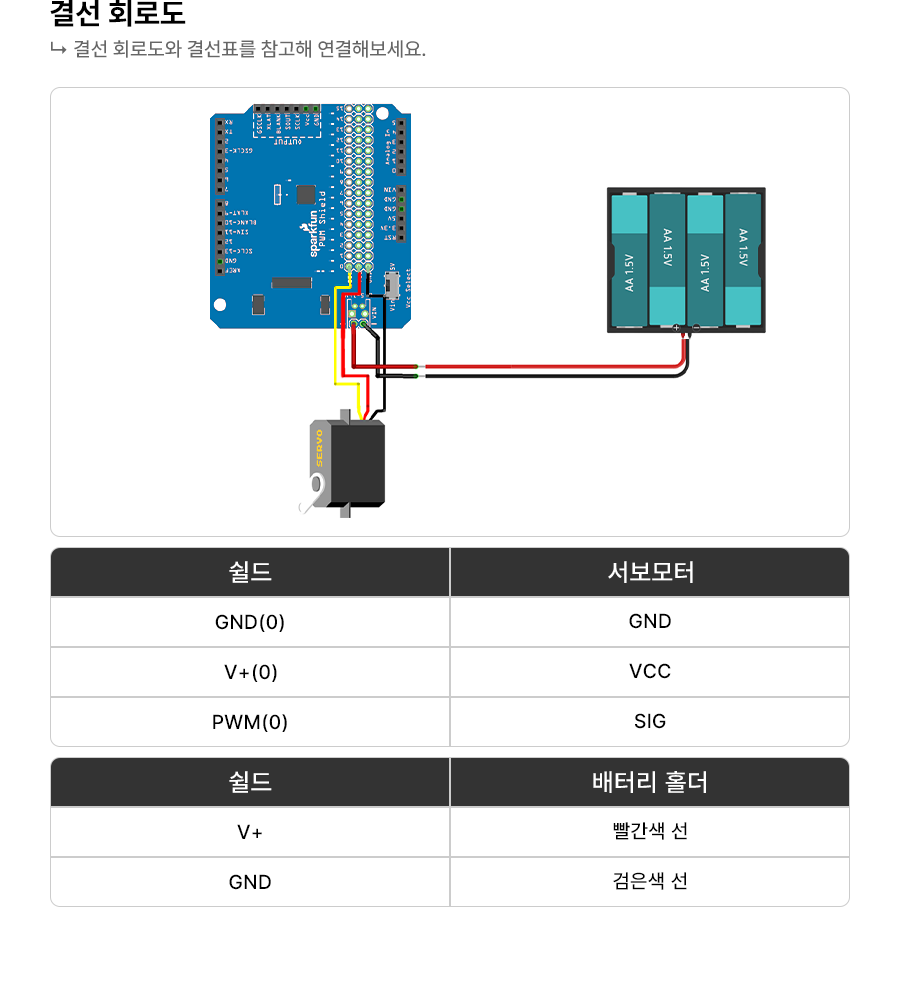
아두이노 16채널 I2C제어 스텝모터 서보모터 드라이버 쉴드
16개의 서보모터 동시 제어, I2C제어
9,200원
(VAT 별도)-
제품번호
EN00000980
-
브랜드명
에듀이노
-
제조사
OEM
-
M.O.Q
1
-
평균발송일
약 3일
- 포장단위
-
판매단위
1
-
배송비
3,000 (60,000원 이상 무료배송)
16개의 서보모터 동시 제어, I2C제어
수량
총 주문 금액
9,200원
(VAT 포함) 10,120원
상품상세정보



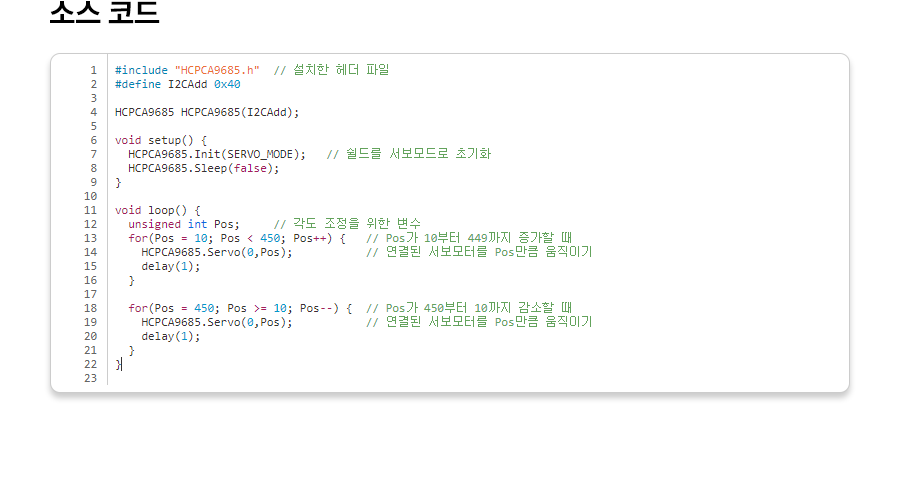
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | #include "HCPCA9685.h" // 설치한 헤더 파일 #define I2CAdd 0x40 HCPCA9685 HCPCA9685(I2CAdd); void setup() { HCPCA9685.Init(SERVO_MODE); // 쉴드를 서보모드로 초기화 HCPCA9685.Sleep(false); } void loop() { unsigned int Pos; // 각도 조정을 위한 변수 for(Pos = 10; Pos < 450; Pos++) { // Pos가 10부터 449까지 증가할 때 HCPCA9685.Servo(0,Pos); // 연결된 서보모터를 Pos만큼 움직이기 delay(1); } for(Pos = 450; Pos >= 10; Pos--) { // Pos가 450부터 10까지 감소할 때 HCPCA9685.Servo(0,Pos); // 연결된 서보모터를 Pos만큼 움직이기 delay(1); } } | cs |

등록된 사용후기
사용후기가 없습니다.
등록된 상품문의
상품문의가 없습니다.