







.jpg)

.jpg)



















.jpg)






























.jpg)









* 본 이미지는 참고용입니다.제품의 정확한 사양은 데이터시트를 참고 바랍니다.
- 공유하기
-




센서
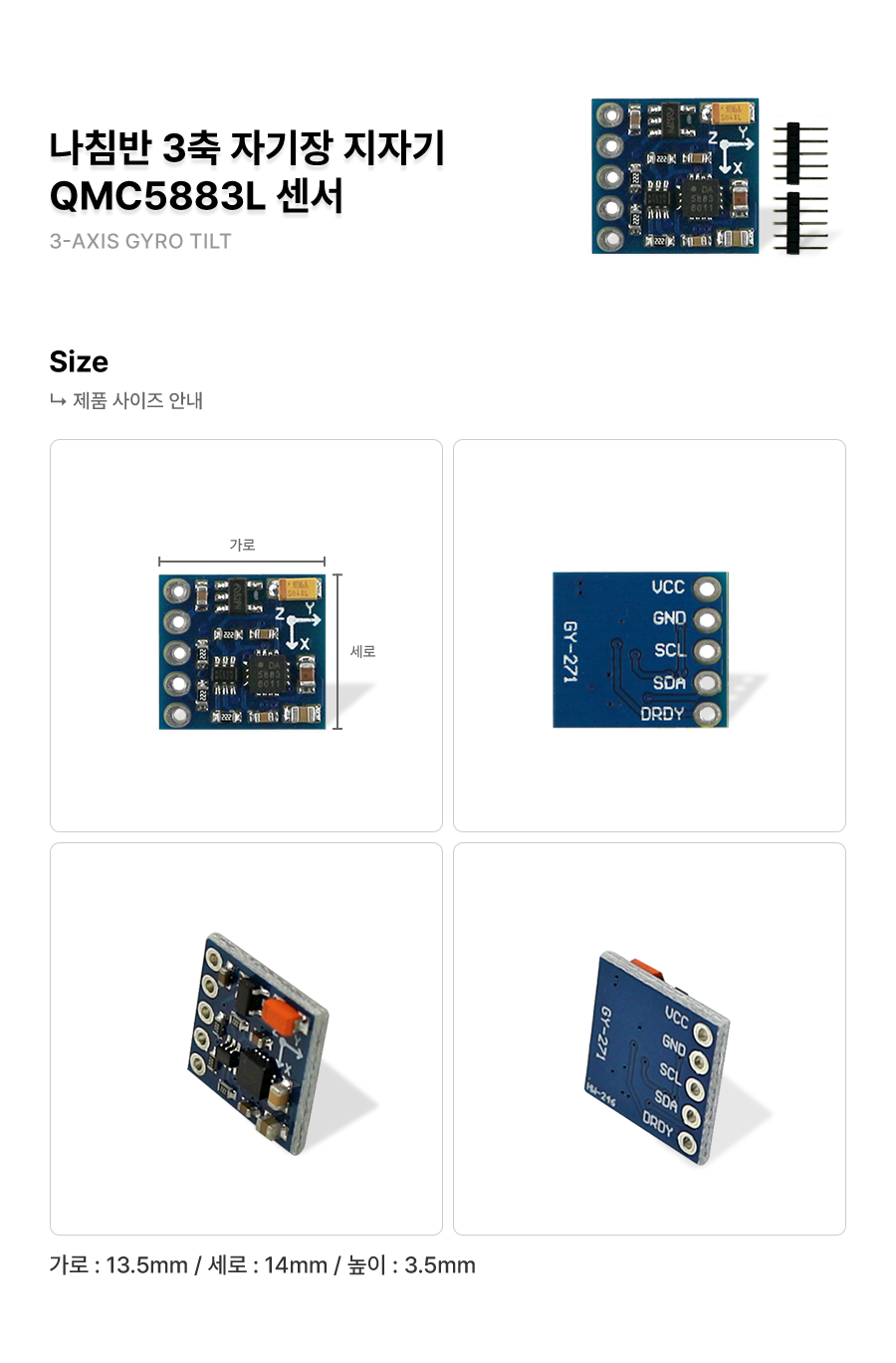
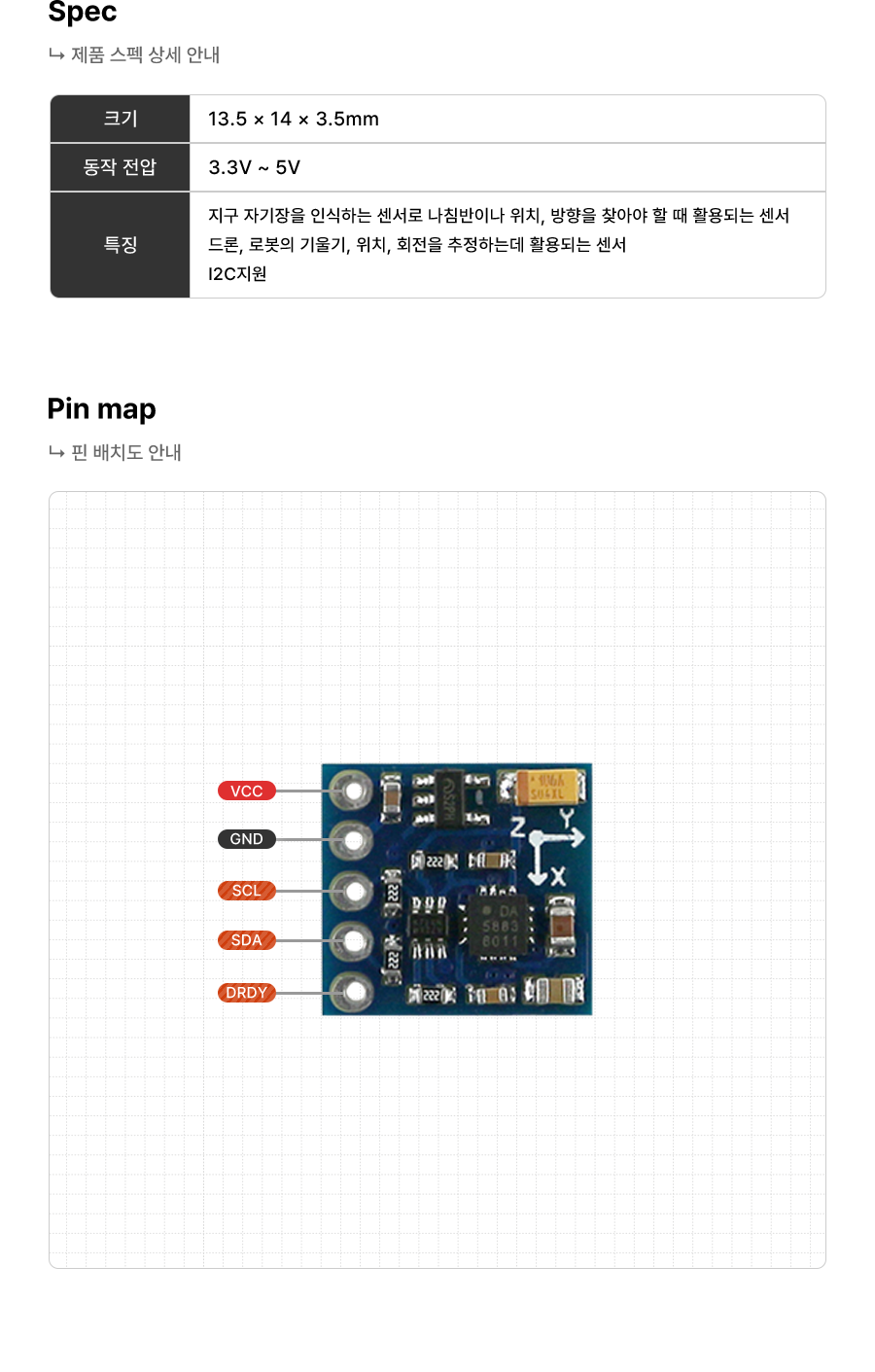
아두이노 나침반 3축 자기장 지자기 QMC5883L 센서 / Arduino Sensor
GY-271
3,300원
(VAT 별도)-
제품번호
EN00002515
-
브랜드명
에듀이노
-
제조사
OEM
-
M.O.Q
1
-
평균발송일
약 3일
- 포장단위
-
판매단위
1
-
배송비
3,000 (60,000원 이상 무료배송)
GY-271
수량
총 주문 금액
3,300원
(VAT 포함) 3,630원
상품상세정보

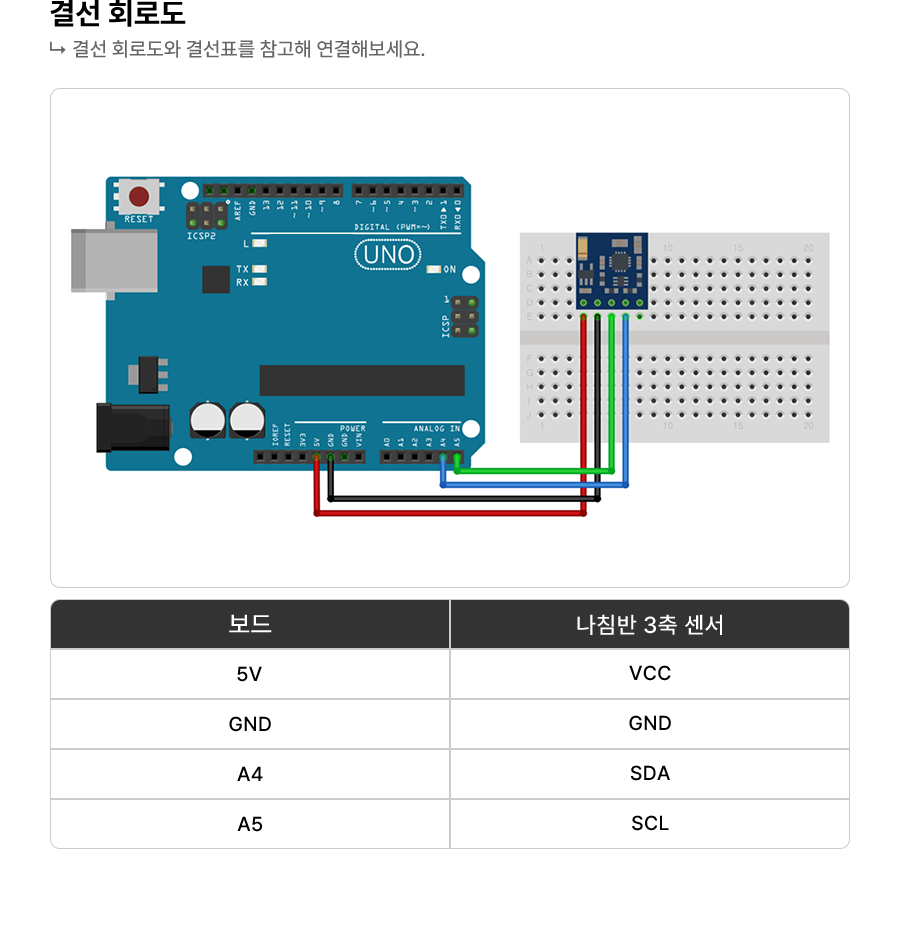
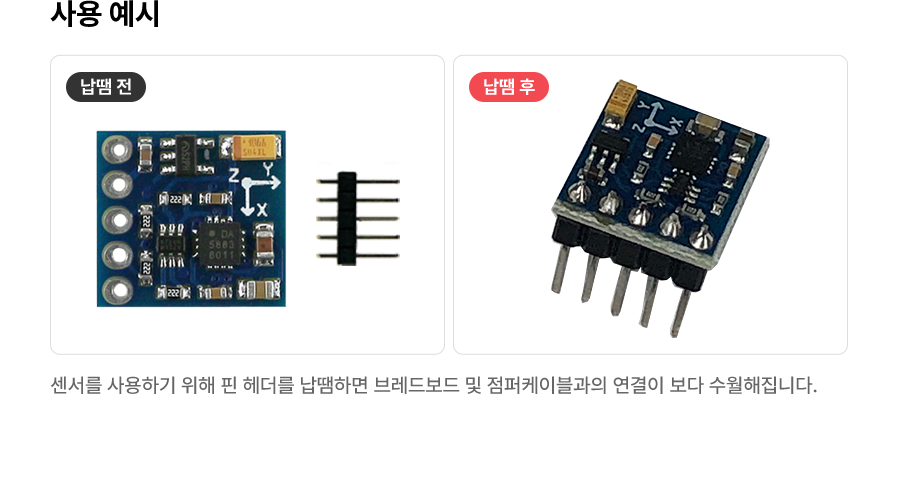
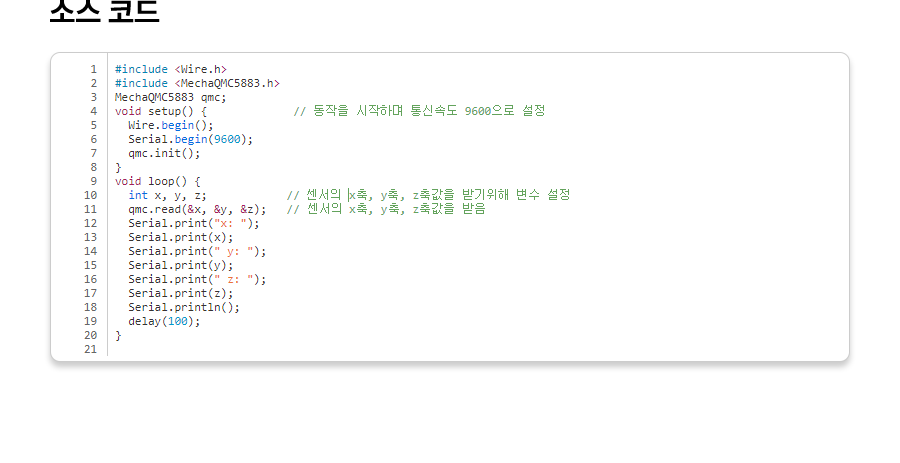
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | #include <Wire.h> #include <MechaQMC5883.h> MechaQMC5883 qmc; void setup() { // 동작을 시작하며 통신속도 9600으로 설정 Wire.begin(); Serial.begin(9600); qmc.init(); } void loop() { int x, y, z; // 센서의 x축, y축, z축값을 받기위해 변수 설정 qmc.read(&x, &y, &z); // 센서의 x축, y축, z축값을 받음 Serial.print("x: "); Serial.print(x); Serial.print(" y: "); Serial.print(y); Serial.print(" z: "); Serial.print(z); Serial.println(); delay(100); } | cs |
등록된 사용후기
사용후기가 없습니다.
등록된 상품문의
상품문의가 없습니다.