
.jpg)
























.jpg)





.png)









* 본 이미지는 참고용입니다.제품의 정확한 사양은 데이터시트를 참고 바랍니다.
- 공유하기
-




센서
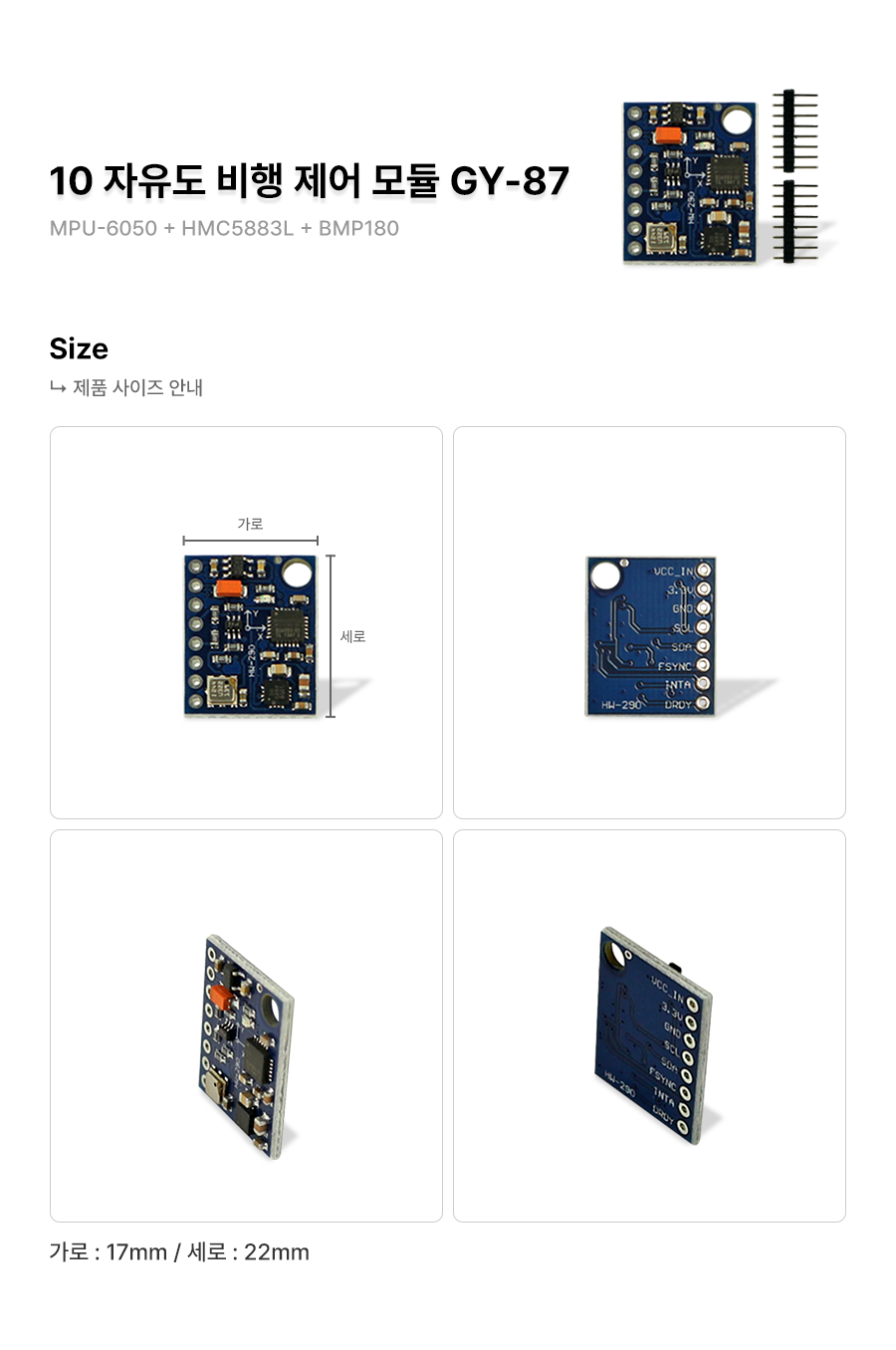
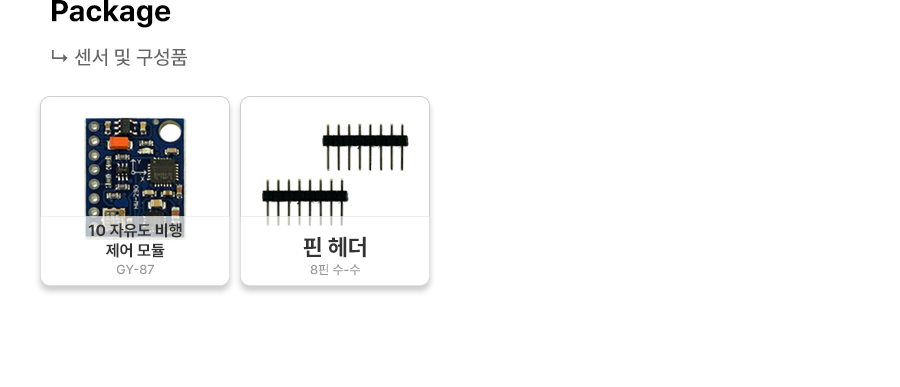
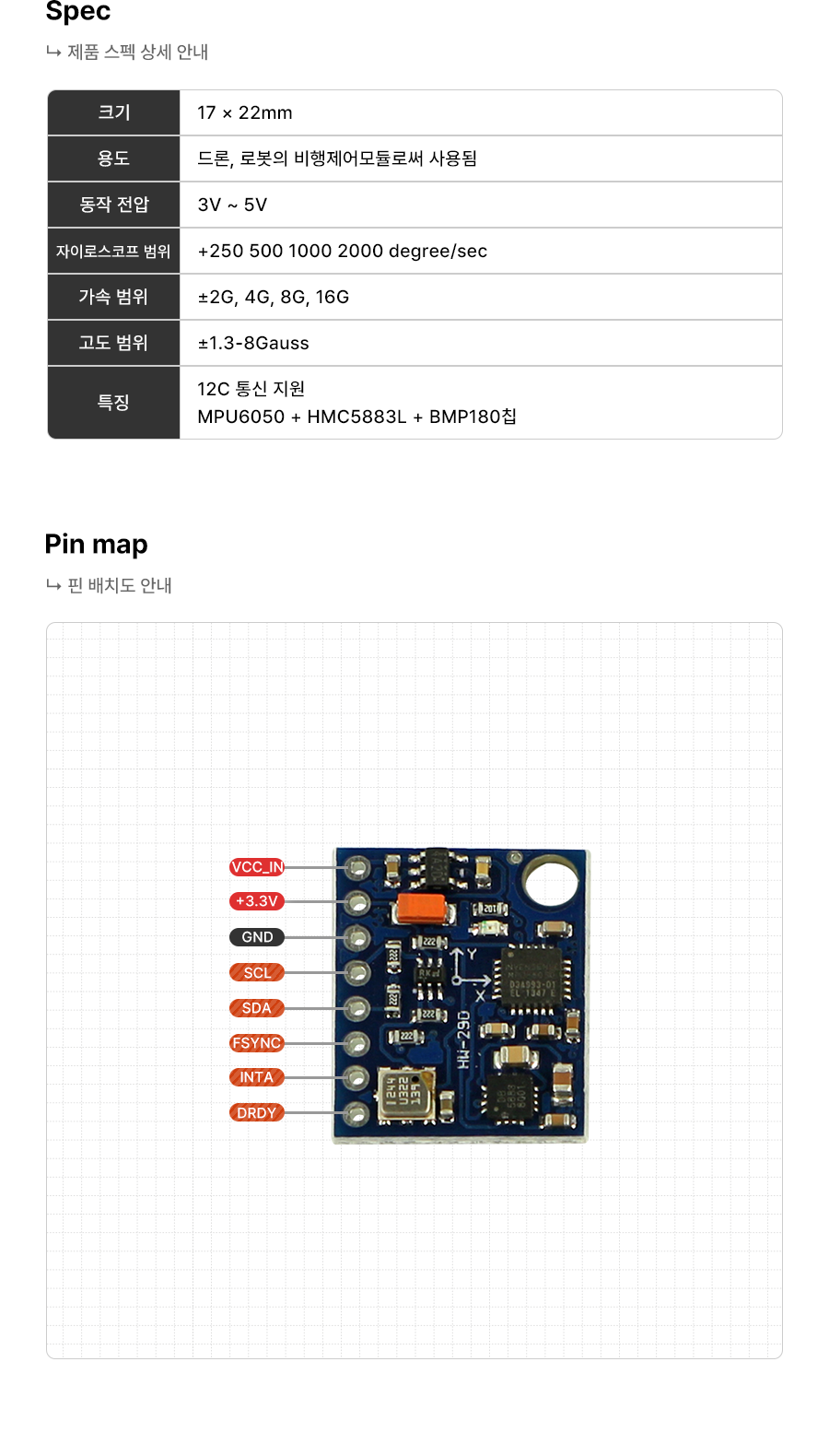
아두이노 10자유도 비행제어모듈 GY-87(MPU-6050+HMC5883L+BMP180)
MPU-6050+HMC5883L+BMP180
8,800원
(VAT 별도)-
제품번호
EN00002520
-
브랜드명
에듀이노
-
제조사
OEM
-
M.O.Q
1
-
평균발송일
약 3일
- 포장단위
-
판매단위
1
-
배송비
3,000 (60,000원 이상 무료배송)
MPU-6050+HMC5883L+BMP180
수량
총 주문 금액
8,800원
(VAT 포함) 9,680원
상품상세정보


|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93 |
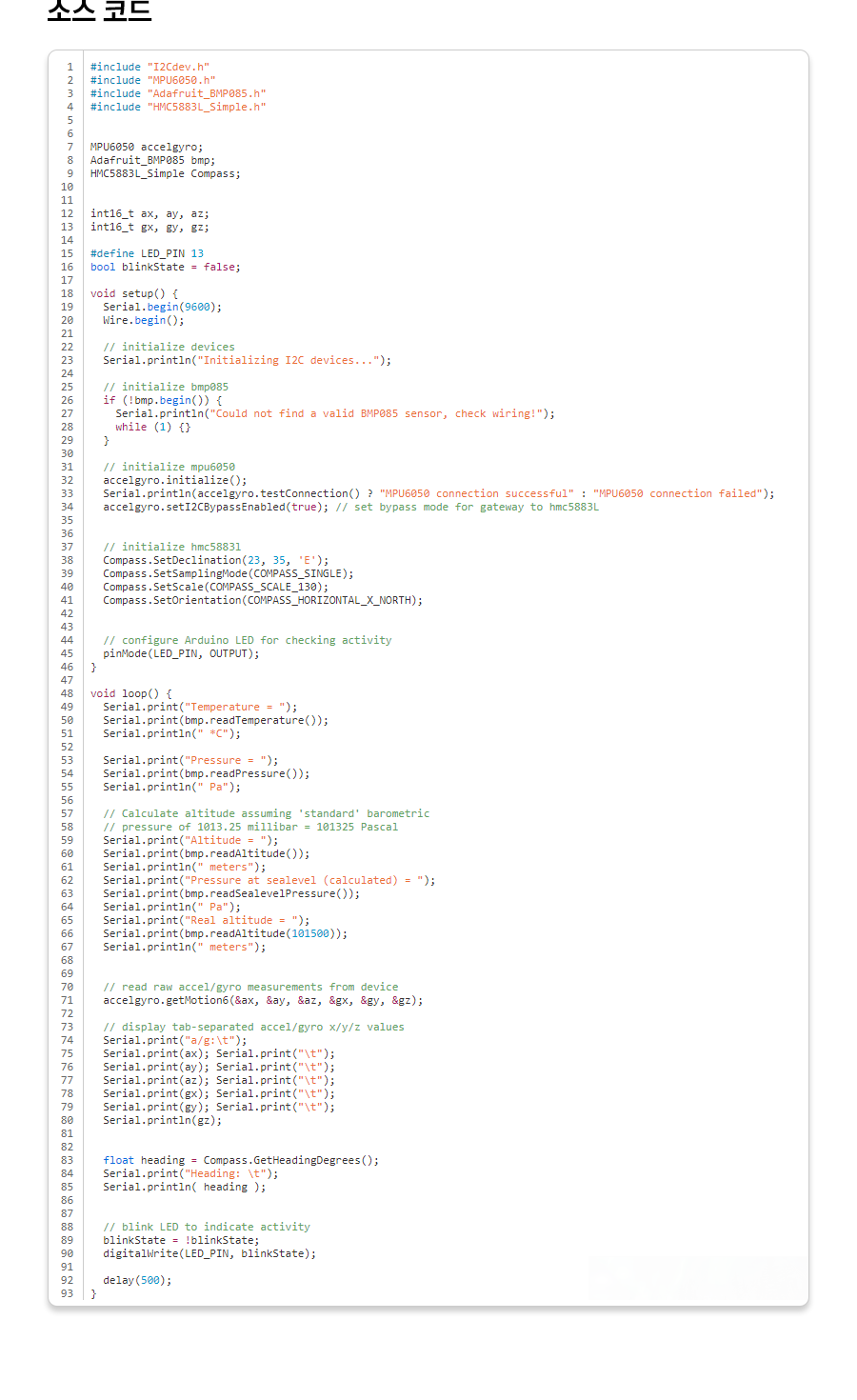
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Adafruit_BMP085.h"
#include "HMC5883L_Simple.h"
MPU6050 accelgyro;
Adafruit_BMP085 bmp;
HMC5883L_Simple Compass;
int16_t ax, ay, az;
int16_t gx, gy, gz;
#define LED_PIN 13
bool blinkState = false;
void setup() {
Serial.begin(9600);
Wire.begin();
// initialize devices
Serial.println("Initializing I2C devices...");
// initialize bmp085
if (!bmp.begin()) {
Serial.println("Could not find a valid BMP085 sensor, check wiring!");
while (1) {}
}
// initialize mpu6050
accelgyro.initialize();
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");
accelgyro.setI2CBypassEnabled(true); // set bypass mode for gateway to hmc5883L
// initialize hmc5883l
Compass.SetDeclination(23, 35, 'E');
Compass.SetSamplingMode(COMPASS_SINGLE);
Compass.SetScale(COMPASS_SCALE_130);
Compass.SetOrientation(COMPASS_HORIZONTAL_X_NORTH);
// configure Arduino LED for checking activity
pinMode(LED_PIN, OUTPUT);
}
void loop() {
Serial.print("Temperature = ");
Serial.print(bmp.readTemperature());
Serial.println(" *C");
Serial.print("Pressure = ");
Serial.print(bmp.readPressure());
Serial.println(" Pa");
// Calculate altitude assuming 'standard' barometric
// pressure of 1013.25 millibar = 101325 Pascal
Serial.print("Altitude = ");
Serial.print(bmp.readAltitude());
Serial.println(" meters");
Serial.print("Pressure at sealevel (calculated) = ");
Serial.print(bmp.readSealevelPressure());
Serial.println(" Pa");
Serial.print("Real altitude = ");
Serial.print(bmp.readAltitude(101500));
Serial.println(" meters");
// read raw accel/gyro measurements from device
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// display tab-separated accel/gyro x/y/z values
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
float heading = Compass.GetHeadingDegrees();
Serial.print("Heading: \t");
Serial.println( heading );
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
delay(500);
} |
cs |
등록된 사용후기
사용후기가 없습니다.
등록된 상품문의
상품문의가 없습니다.