









































































































- 공유하기
-




DFRobot 거리 센서 TF02-i LiDAR Laser Range Sensor (40m) SEN0504 디에프로봇
DFRobot 거리 센서 TF02-i LiDAR Laser Range Sensor (40m) SEN0504 디에프로봇
212,700원
(VAT 별도)-
제품번호
ES00013283
-
브랜드명
DFRobot
-
제조사
DFRobot
-
M.O.Q
1
-
평균발송일
약 3일
- 포장단위
-
판매단위
1
-
배송비
3,000 (60,000원 이상 무료배송)
212,700원
(VAT 포함) 233,970원






소개
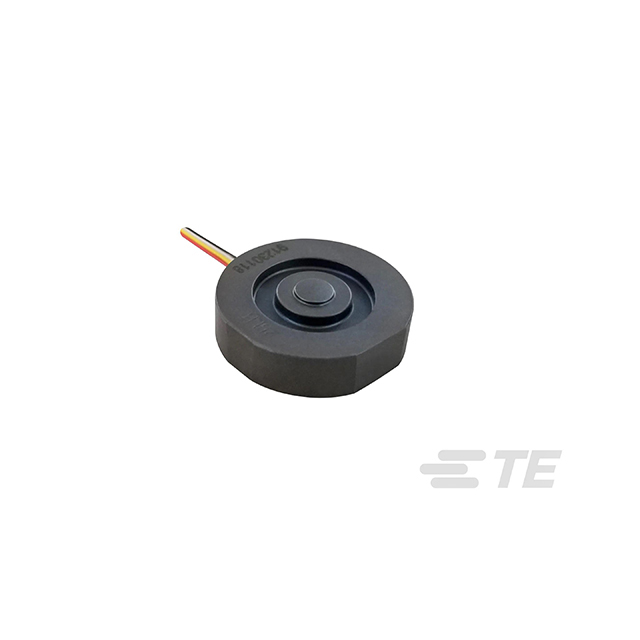
TF02-i LiDAR는 산업 등급 중거리 거리 센서입니다. 최대 감지 범위는 최대 40m에 달할 수 있으며 최대 1KHz로 프레임 속도를 조정할 수 있습니다.
이 거리 측정기는 IP65 방수 및 방진 기능을 갖춘 PC/ABS/PMMA 외함을 갖추고 있습니다. 내부 회로를 보호하기 위해 역방향 보호 기능이 있는 광범위한 입력 전압(7-30V)을 지원하며 RS485 통신 인터페이스 및 표준 Modbus 프로토콜을 채택합니다. 사용자가 다양한 애플리케이션에 맞게 매개변수와 구성을 변경할 수 있도록 여러 내장 작동 모드가 포함되어 있습니다.
TF02-i LiDAR는 TTL to RS485 Shield를 통해 Arduino UNOR3 에서 사용할 수 있으며 USB to RS485 모듈을 통해 Raspberry Pi 에서도 사용할 수 있습니다 . DFRobot이 제공하는 이 두 가지 방법은 TF02-i LiDAR를 사용하기 쉽게 만들 수 있습니다.
")
TF02-i LIDAR는 어떻게 작동합니까?
TF02-i는 PTOF(Pulse Time of Flight)를 기반으로 하는 단일 포인트 LiDAR입니다.
그것은 일관성 없는 에너지 수신 모드를 채택하고 감지는 주로 펄스 계산을 기반으로 합니다. TF02-i는 좁은 펄스 레이저를 방출합니다. 이 레이저는 송신 렌즈에 의해 시준되어 시준된 빛을 형성합니다. 이 레이저는 측정 대상에 의해 반사된 후 수신 시스템으로 들어가고 수신 렌즈에 의해 APD 검출기에 초점을 맞춥니다.
송신 신호와 수신 신호 사이의 시간은 회로 증폭 및 필터링을 통해 계산되며, TF02-i와 측정 대상 사이의 거리는 광속을 통해 계산할 수 있습니다.
")
")
애플리케이션
선택 가이드
| 매개변수 | TFmini-i 라이다 | TF02-i 라이다 | |
제품 성능 | 작동 범위 | 0.1-12m@90% 반사율 | 0.1-40m@90% 반사율 |
| 0.1 7 m @ 10 % 반사율 | 0.1-13.5m@10% 반사율 | ||
| 0.1-12m@90% 반사율&70Klux | 0.1-40m@90% 반사율&100Klux | ||
| 0.1 7 m @ 10 %의 반사율 및 70Klux | 0.1-13.5m@10% 반사율&100Klux | ||
| 정확성 | ± 6 cm(0.1 ~ 6 m), ± 1%( 6 ~ 12 m) | ±5cm(0.1~5m), ±1%(5~40m) | |
| 거리 분해능 | 1cm | 1cm | |
| 프레임 속도 | 100Hz | 100Hz | |
| 주변광 내성 | 70Klux | 100Klux | |
| 작동 온도 | -20~60℃ | -20~60℃ | |
| 인클로저 등급 | IP65 | IP65 | |
| 광학 매개변수 | 광원 | VCSEL | VCSEL |
| 중심 파장 | 850nm | 850nm | |
| 광생물학적 안전성 | 클래스1(EN60825) | 클래스1(EN60825) | |
| FOV(시야) | 2° | 3° | |
| 전기 매개변수 | 전원 전압 | 7~30V | 7~30V |
| 평균 전류 | ≤ 65mA@12V | ≤ 70mA@12V | |
| 전력 소비 | ≤0.8W@12V | ≤0.85W@12V | |
| 피크 전류 | 100mA | 100mA | |
| 기타 | 통신 인터페이스 | RS-485 | RS-485 |
| 치수 | 50mm*34mm*41mm(길이*가로*높이 ) | 69mmx41.5mmx31.5mm(길이*가로*높이 ) | |
등록된 사용후기사용후기가 없습니다. 등록된 상품문의상품문의가 없습니다.  | |||